Tomo-PIV + 3D-PTV
The project utilizes a laser-optic based observation and measurement system containing Tomo-PIV and 3D-PTV. The Tomo-PIV technique is used for the flow velocity measurement; the 3D-PTV technique is used for the recording of copepod trajectory and its relevant dynamics, such as floating velocity and escape acceleration.
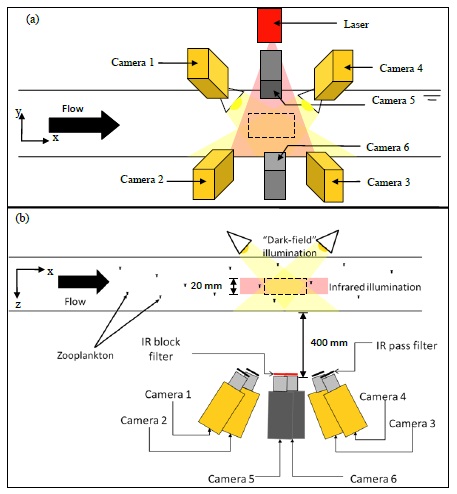 |
| The camera and illumination alignment of the Tomo-PIV + 3D-PTV experimental setup. |
Visual Hull
A key technology, namely the visual hull, is used to reduce the velocity error due to the presence of copepod or fish, which is largely increased when escape or preying takes place. For fish, the procedure of visual hull operation is carried out by first reconstructing the 3D presence of copepod or fish based on the spatial information from Tomo-PIV. For copepod, its 3D spatial position is derived from 3D-PTV and the copepod is considered as a sphere with a certain diameter. The intensities inside the identified hull or sphere are later set to be zero. The manipulated 3D intensity distribution is finally used for 3D cross-correlation.
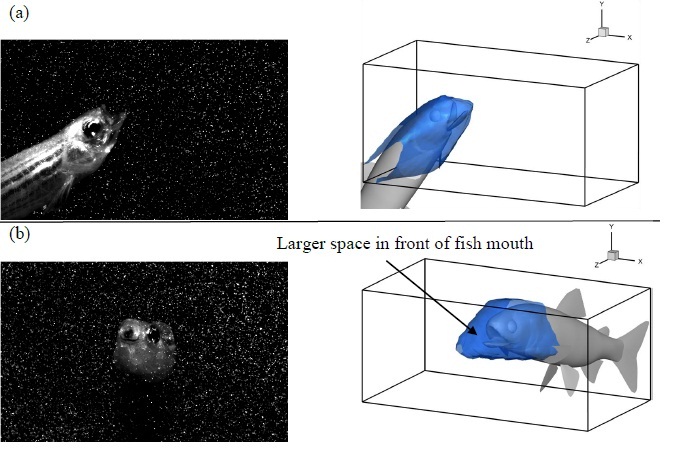 |
| Two examples of visual hull for the fish. |
Last Modified: 2015-05-25 at 20:30:43 -- this is in International Standard Date and Time Notation