
Order Reduction
LPV Model Reduction
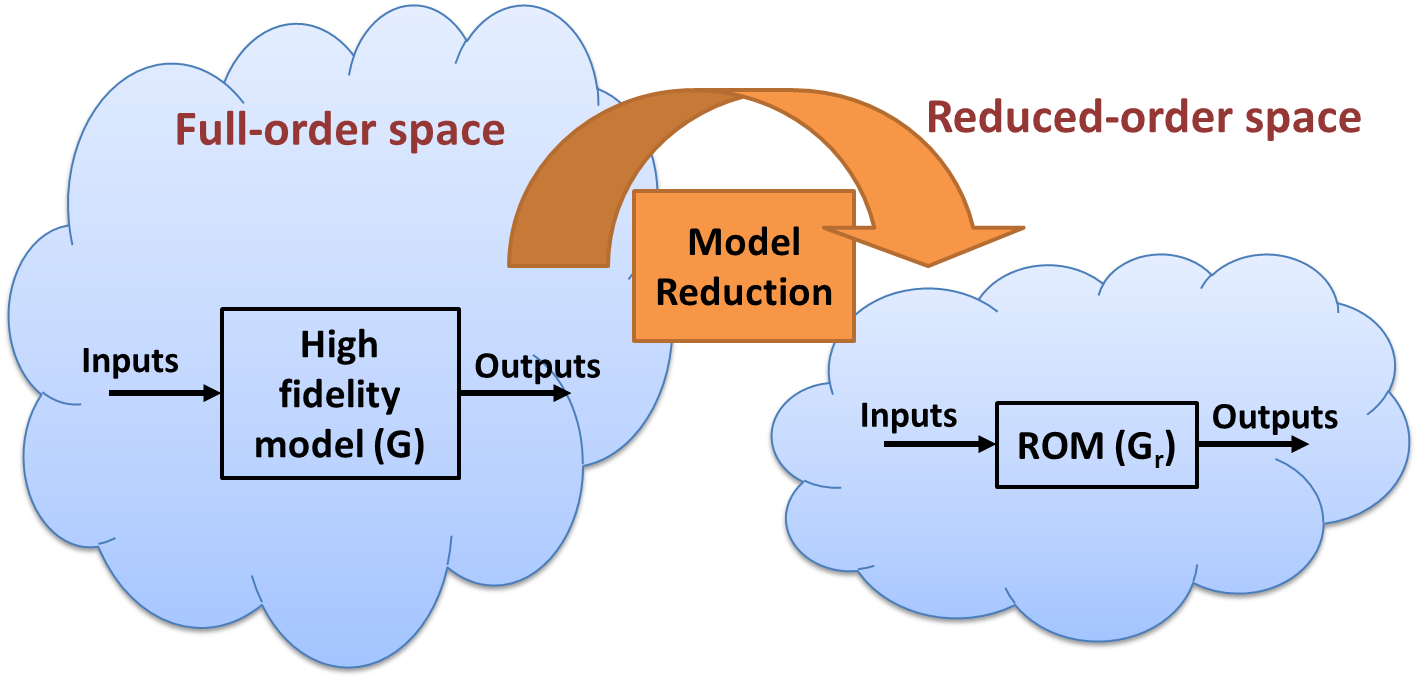
The LPV system framework provides a rich, theoretical control analysis and design framework for nonlinear systems. Unfortunately, the inclusion of structural dynamics and aeroelastic effects in modeling flexible aircraft results in linear, dynamic models with a large number of degrees of freedom. It is unrealistic to use these high-order models for control design because modern control methods will result in controllers with high-state-order models. Even more, practical implementation of high-order controllers is usually avoided because computational issues associated with synthesizing LPV controllers increase with the state order of the design model. Hence, a reduced-order LPV model of the flexible aircraft will allow model-based, gain-scheduled multivariable controllers to be synthesized and implemented on ASE flight vehicles.
Graduate Student: Julian Theis
The LPV system framework provides a rich, theoretical control analysis and design framework for nonlinear systems. Unfortunately, the inclusion of structural dynamics and aeroelastic effects in modeling flexible aircraft results in linear, dynamic models with a large number of degrees of freedom. It is unrealistic to use these high-order models for control design because modern control methods will result in controllers with high-state-order models. Even more, practical implementation of high-order controllers is usually avoided because computational issues associated with synthesizing LPV controllers increase with the state order of the design model. Hence, a reduced-order LPV model of the flexible aircraft will allow model-based, gain-scheduled multivariable controllers to be synthesized and implemented on ASE flight vehicles.
Graduate Student: Julian Theis
Publications:
- H. Pfifer and T. Peni, Model Reduction for LPV Systems Using Scaled Diagonal Dominance , submitted to the American Control Conference, 2016.
- J. Theis, P. Seiler and H. Werner, Model Order Reduction By Parameter-Varying Oblique Projection , submitted to the American Control Conference, 2016. (mfiles)
- J. Theis, B. Takarics, H. Pfifer, G. Balas and H. Werner, Modal Matching for LPV Model Reduction of Aeroservoelastic Vehicles , AIAA Science and Technology Forum, 2015.
- C. Moreno, P. Seiler, and G. Balas, Model Reduction for Aeroservoelastic Systems, Journal of Aircraft, Vol. 51, p.280-290, 2014.
- C. Moreno, P. Seiler, and G. Balas, Linear, Parameter Varying Model Reduction for Aeroservoelastic Systems, AIAA Atmospheric Flight Mechanics Conference, AIAA 2012-4859, 2012.
- C. Moreno, P. Seiler, G. Balas and J. Sofrony, Model Reduction of Flexible Aircraft for Flutter Suppression Using Smart Sensors, 6th International Workshop on Advanced Smart Materials and Smart Structures Technology(ANCRiSST), 2011.